深度解析激光探测器SPAD:单光子级探测的原理与核心性能指标
导语
在激光探测向“极致精准”升级的浪潮中,单光子雪崩二极管(Single Photon Avalanche Diode)凭借单光子级探测灵敏度、ns级时间分辨率的核心优势,成为高端激光传感、自动驾驶、医疗成像等领域的“核心感知器件”。不同于传统光电探测器的“粗略捕捉”,SPAD能精准识别每一个入射光子,打破了激光探测在微弱信号、远距离场景下的性能瓶颈,成为推动激光技术从“实验室”走向“产业化”的关键支撑。
上篇介绍了APD,此篇开始将从技术研发与产业化的角度,从核心原理、关键性能指标、工程应用常见问题及解决方案、性价比分析四大维度,结合真实市场应用案例,全面拆解这款“单光子探测神器”,让大家读懂SPAD的核心价值与应用逻辑。
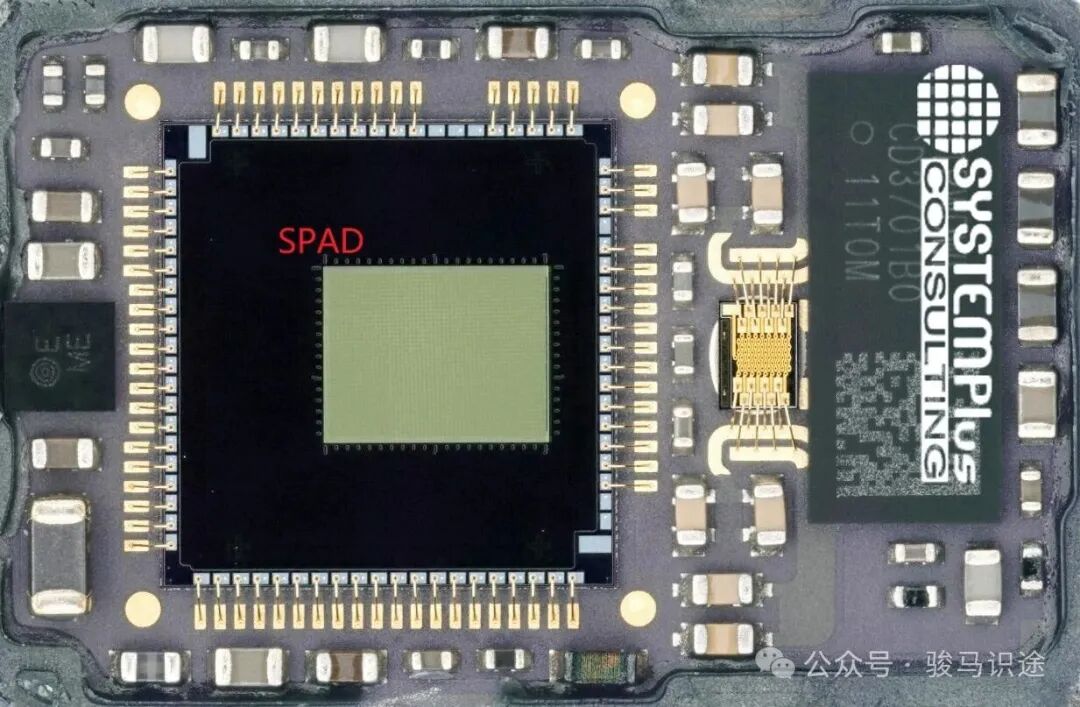
图1 苹果手机dTOF方案(VCSEL+SPAD)
SPAD核心原理:单光子探测的底层逻辑,读懂“极致灵敏”的本质
SPAD是一种可以检测弱光的像素结构,它的核心定位是“单光子级固态光电探测器”,其本质是工作在盖革模式(Geiger Mode)下的特殊雪崩光电二极管(APD),核心优势在于“能捕捉到单个光子的入射信号”,这也是其与传统APD、光电二极管(PD)的核心区别。
要理解SPAD的工作机制,需抓住“反向偏置、雪崩倍增、快速淬灭”三大核心环节,简化后可分为三个关键步骤,兼顾专业性与易懂性:
1. 偏置电压设定:SPAD工作时,需施加高于其击穿电压的反向偏置电压(通常为几十到上百伏),此时器件内部形成极强的电场,为载流子加速提供条件——这是SPAD能实现单光子探测的基础,传统APD仅工作在接近击穿电压的线性模式,无法达到单光子探测阈值。
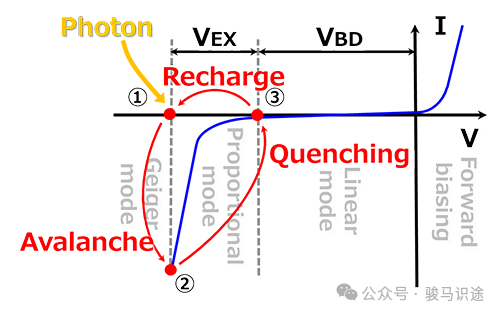
图2 SPAD像素的原理
2. 单光子触发与雪崩倍增:当单个激光光子入射到SPAD的光敏面时,光子被硅半导体材料吸收,激发产生一对电子-空穴对。在强电场作用下,这对载流子被加速,撞击硅晶格产生更多次级电子-空穴对,形成“雪崩效应”——一次雪崩可产生10⁶~10⁷个载流子,相当于将单光子信号放大百万倍以上,实现“单个光子可被识别”的核心需求。
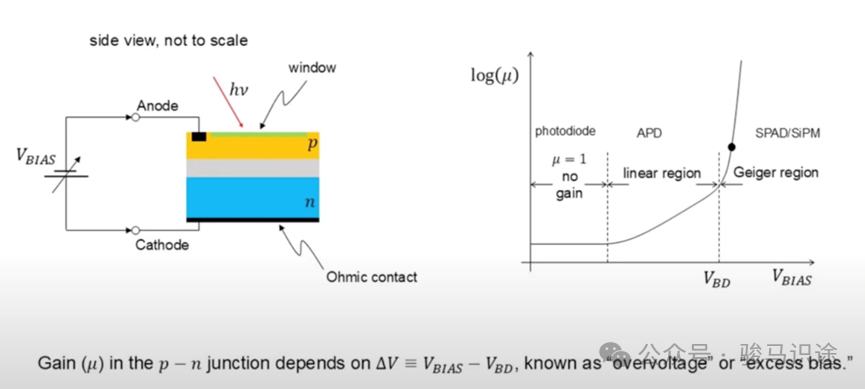
图3 单光子触发与雪崩倍增
3. 淬灭与复位:雪崩效应若持续发生,会导致器件损坏,因此SPAD必须配备淬灭机制(分为被动淬灭和主动淬灭)。被动淬灭通过串联淬灭电阻实现,当雪崩产生大量载流子时,电阻产生电压降,使器件偏置电压瞬间低于击穿电压,雪崩停止,恢复过程则依赖RC时间常数,限制了最大计数率,典型恢复时间约为几十纳秒;主动淬灭则通过高速比较器检测脉冲前沿,在极短时间内将偏置拉低至击穿以下,并设定保持时间以防止余脉冲。电路实现中常采用高速MOS开关控制偏置路径,实现纳秒级关断与恢复。
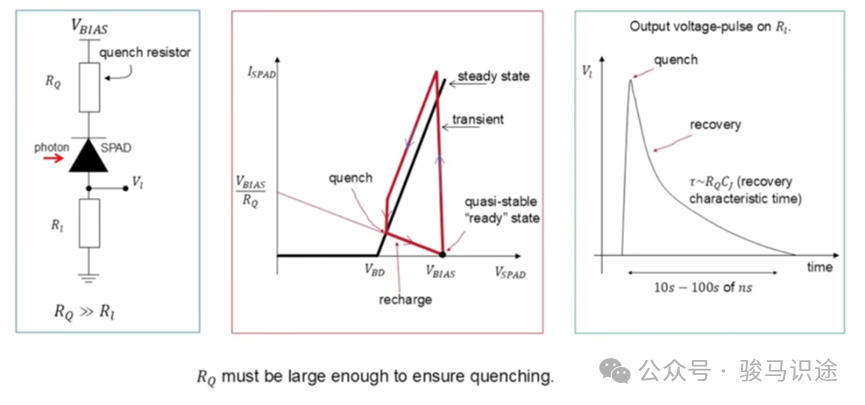
图4 被动淬灭
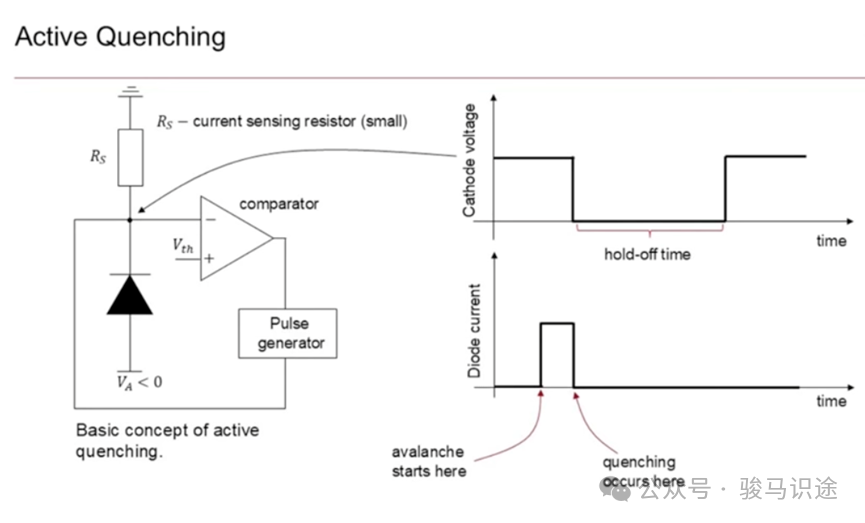
图5 主动动淬灭
SPAD输出为二值信号:若检测到光子即输出“1”,否则为“0”。这使得单体SPAD无法区分一个时间窗口内到底来了多少个光子。
这里需要明确一个关键认知:SPAD是“单光子探测器”,核心功能是“判断是否有光子入射”,而非“量化光子数量”——这一点与由多个SPAD单元组成的SiPM(硅光电倍增管)有本质区别,SiPM可通过多单元协同实现光子计数,而单个SPAD更侧重“高灵敏度、高时间分辨率”的单光子识别,二者互补适配不同激光探测场景。
SPAD与PD和APD的区别
SPAD与PD和APD的主要区别在于工作模式有所不同,如下:
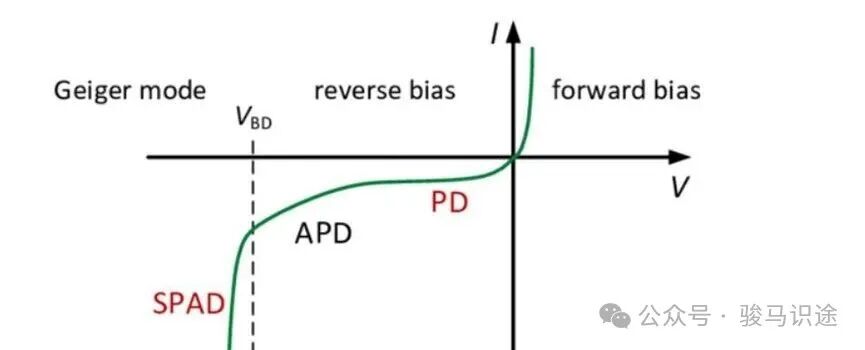
图6 SPAD与PD、APD的工作模式
PD处于线性模式,我们生活中常见图像传感器的工作范围,一般PD的反向电压不会太高,因此PD的增益较小;
随着反向电压的增加,进入APD的工作区间,此时光电二极管依然处于线性区间,电子的累计使得电流电压发生改变。APD的增益与反向偏置电压成正比; 当反向电压超出击穿电压时,光电二极管进入盖格模式,此时单个光子的射入就可以使光电二极管电流发生迅速的增加,因此SPAD的增益比APD高,但同时高增益及工作区间的特性会使SPAD的噪声比APD也较高。
关键性能指标:判断SPAD优劣的核心
对于激光探测场景而言,SPAD的性能指标直接决定探测精度、可靠性和适配性,作为从业者,需重点关注以下5个核心指标,也是选型时的关键依据,结合工程应用场景逐一解析:
1. 光子探测效率(PDE)
这是核心指标,指探测到的光子数与入射光子数的比值,单位为 %。激光探测常用近红外波段(905nm、1550nm),优质工业级SPAD的PDE可达到50%~70%,PDE越高,对微弱激光回波的捕捉能力越强——例如车载激光雷达远距离探测时,激光回波光子数量极少,高PDE可避免漏检,保障感知精度。
多说一句,卓越的光子探测效率来自优化三个关键因素:量子效率、电荷收集效率和触发概率。
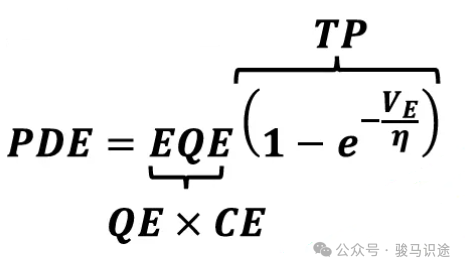
PDE可以表达为三个因素的乘积:QE、电荷收集效率(CE)和触发概率(TP)。QE由器件的物理结构决定,通过无间隙OCL和PSD已经最大化。CE代表将硅区域中产生的电子传输到倍增区域的效率。NIR光的光子转换区域扩散到整个硅区域,需要精确将电子从整个硅区域传输到倍增区域的掺杂设计。
2. 暗计数率(DCR)
光子入射时,由热生载流子、杂质缺陷触发的虚假脉冲数,单位为kHz。暗计数率越低,探测精度越高,虚假信号越少——工业级SPAD的暗计数率通常控制在10~100kHz,车载级、医疗级高端产品可降至10kHz以下,避免因虚假信号导致的探测误判。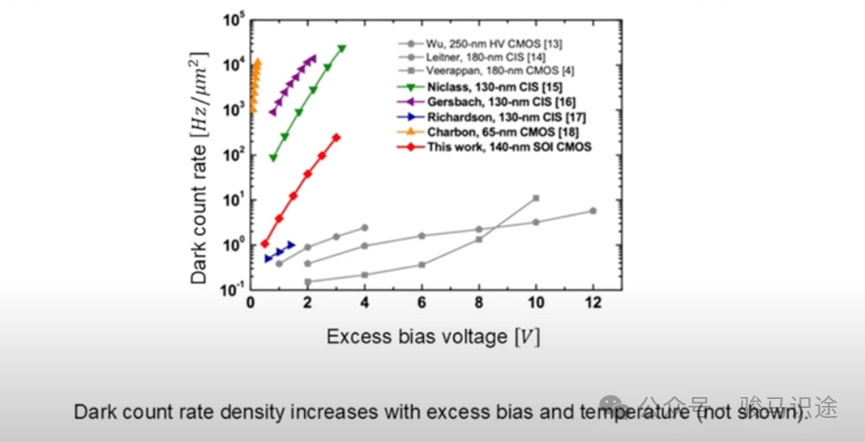
3. 时间分辨率(TR)
指SPAD捕捉光子入射到输出电信号的响应时间,单位为ns。激光探测中,时间分辨率直接决定距离测量精度,SPAD的时间分辨率可达到10~50ns,远优于传统APD(百ns级),可实现厘米级距离测量,适配自动驾驶、激光测距等高精度场景。
4. 击穿电压(Vbd)
SPAD进入盖革模式的临界电压,不同工艺、尺寸的SPAD击穿电压不同(通常为20~100V)。选型时需匹配驱动电路的供电能力,击穿电压稳定性至关重要——温度变化会导致击穿电压漂移,需通过温度补偿设计优化,避免性能波动。
SPAD单位时间内可探测的最大光子数量,单位为MHz。该指标决定SPAD适配的激光功率范围,最大计数率越高,越能适配高功率激光探测场景(如工业激光探伤),避免因光子通量过高导致器件饱和、无法正常工作。